
5 Advanced Manufacturing Techniques for High-Performance Planetary Gearbox for Robots
Introduction: The Critical Role of Precision Gearing in Robotics
In the rapidly evolving field of industrial automation, the demand for higher precision, greater efficiency, and enhanced durability has never been more critical. At the heart of many advanced robotic systems lies a component that significantly influences overall performance: the planetary gearbox for robots. These sophisticated mechanical assemblies facilitate precise power transmission and motion control, making them indispensable in robotic joints, rotary actuators, and drive systems.
As leading providers of precision CNC machining solutions, JLYPT has developed specialized manufacturing methodologies that push the boundaries of planetary gearbox for robots performance. This comprehensive guide explores five advanced manufacturing strategies that transform standard planetary gearboxes into high-performance components capable of meeting the rigorous demands of modern robotics applications.
1. Fundamental Principles: Why Planetary Gearboxes Excel in Robotic Applications
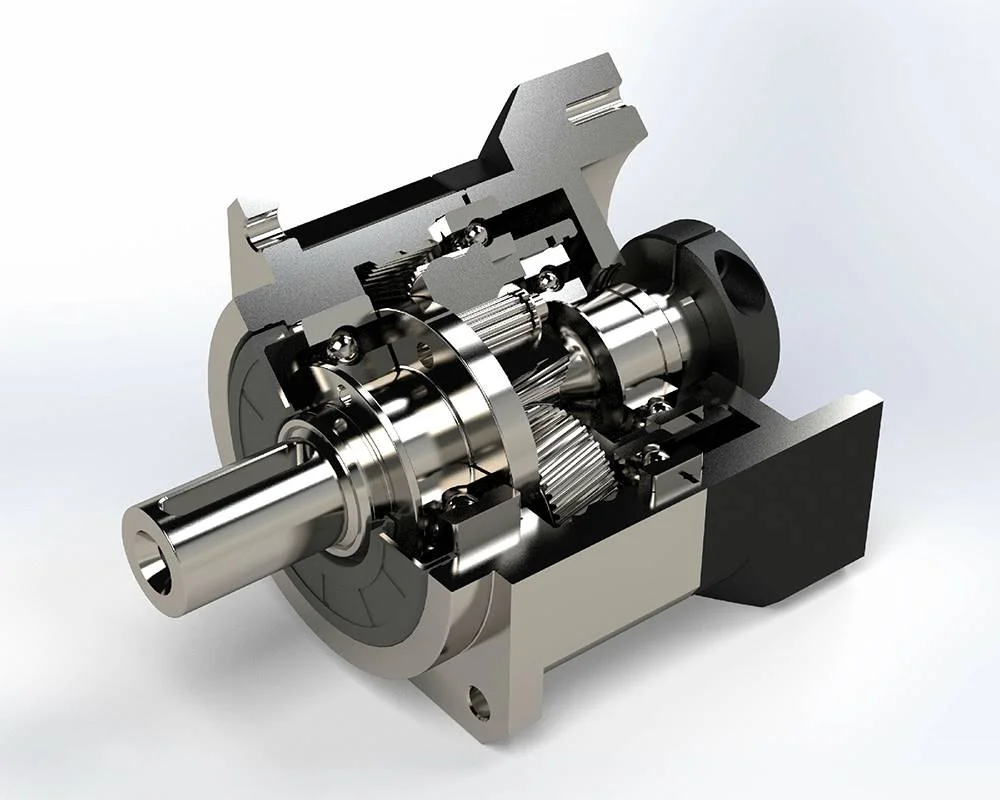
Planetary gearbox for robots derive their name from their operational resemblance to planetary systems, where multiple “planet” gears revolve around a central “sun” gear, all contained within an outer “ring” gear. This unique configuration provides several distinct advantages that make them particularly suitable for robotic applications:
-
High Torque Density: The shared load distribution among multiple planet gears enables compact designs to transmit significant torque relative to their size. This characteristic is crucial in robotics where space constraints and weight considerations are paramount.
-
Precision Motion Control: With proper manufacturing techniques, planetary systems achieve minimal backlash and high positional accuracy. Research indicates that optimized manufacturing processes can significantly improve these precision parameters.
-
Durability and Long Service Life: The multiple gear contacts distribute wear across more surfaces, while advanced heat treatment processes enhance surface durability and overall component lifespan.
-
High Efficiency: Quality planetary gearboxes can achieve efficiency ratings exceeding 90%, minimizing power loss and reducing heat generation in continuous operation scenarios.
The manufacturing quality of these components directly impacts their performance in robotic systems. As identified in industrial studies, optimized production processes can increase efficiency by 13.2% while reducing defect rates by 6.6%.
2. Advanced CNC Machining Techniques for Planetary Gearbox Components
The manufacturing of high-performance planetary gearbox for robots demands machining capabilities that can handle complex geometric profiles with exceptional accuracy. At JLYPT, we employ state-of-the-art 5-axis CNC machining centers equipped with advanced control systems that maintain positioning accuracy within microns.
2.1 Precision Gear Tooth Machining
The heart of any planetary system lies in the precise geometry of its gear teeth. Modern manufacturing approaches have evolved significantly from traditional methods:
-
High-Speed Dry Cutting: Advanced CNC gear hobbing machines equipped with specialized dry cut hobs can produce gear teeth with exceptional surface finish and dimensional accuracy without cooling fluids. This process enhances efficiency while eliminating potential contamination from cutting fluids.
-
5-Axis Simultaneous Machining: Complex gear geometries, including modified tooth profiles with crowning and tip relief, require the capabilities of 5-axis CNC machining. This approach enables continuous tool engagement along curved surfaces, eliminating stair-stepping artifacts and reducing the need for secondary finishing operations.
-
Hard Finishing Processes: For heat-treated components, precision grinding using CNC gear grinders with dressed grinding worms achieves final dimensions and superior surface finish. This process is essential for maintaining geometric accuracy after thermal treatments that enhance material properties.
2.2 Planetary Carrier Manufacturing
The planetary carrier represents one of the most challenging components in a planetary gearbox for robots due to its complex geometry and critical dimensional relationships:
-
High-Precision Boring Operations: The planet gear pin holes must maintain precise position accuracy, typically within 0.005mm, to ensure proper load distribution among all planets. CNC machining centers with high-precision spindle systems and temperature-controlled environments achieve these tight tolerances.
-
Stress Relief Machining Strategies: Sequential machining operations interspersed with stress relief processes prevent distortion in the finished component, maintaining flatness and perpendicularity requirements essential for smooth operation.
-
Cross-Roller Bearing Integration: Modern planetary gearboxes increasingly incorporate cross-roller bearings directly into their design. These require specially machined mounting surfaces with tight tolerances on flatness and perpendicularity to ensure optimal bearing performance and lifespan.
3. Material Selection and Heat Treatment Strategies
The performance characteristics of any planetary gearbox for robots are fundamentally determined by material selection and appropriate heat treatment. Different robotic applications demand specific material properties to ensure optimal performance under varying operational conditions.
3.1 Comprehensive Material Selection Guide
| Material Grade | Typical Applications | Key Advantages | Recommended Heat Treatment | Surface Hardness |
|---|---|---|---|---|
| 4140 Alloy Steel | Industrial robots, heavy-duty applications | Excellent strength-to-cost ratio, good machinability | Through-hardening or carburizing | 45-55 HRC |
| 8620 Alloy Steel | High-load robotic joints, aerospace applications | Superior case hardenability, tough core properties | Carburizing and hardening | 58-64 HRC case |
| 4340 Alloy Steel | Extreme performance applications, military robotics | Exceptional strength and impact resistance | Through-hardening | 48-55 HRC |
| Stainless 17-4PH | Medical robots, food processing automation | Corrosion resistance, high strength | Precipitation hardening (H900) | 40-48 HRC |
| Aluminum 7075-T6 | Collaborative robots, drone applications | Outstanding strength-to-weight ratio | Hard coat anodizing | 60-70 HRC surface |
3.2 Advanced Heat Treatment Processes
Carburizing for Enhanced Durability
Carburizing remains the gold standard for high-performance planetary gearbox for robots applications. This thermochemical process involves diffusing carbon into the surface layer of low-carbon steel at elevated temperatures, typically between 850°C and 950°C. The process creates a carbon-rich case while maintaining a tough, ductile core.
The carburized components undergo subsequent quenching and tempering operations to achieve the desired surface hardness and core properties. For planetary gearbox for robots applications, case depths typically range from 0.5mm to 1.5mm, depending on module size and application requirements.
Nitriding for Minimal Distortion
For applications where dimensional stability is critical, nitriding offers significant advantages. This lower-temperature process (typically 500°C to 550°C) introduces nitrogen into the surface, creating extremely hard nitrides without the phase transformations associated with quenching.
The minimal distortion characteristics of nitriding make it particularly suitable for complex gear geometries where post-heat-treatment machining is impractical. This process excels for ring gears and planetary carriers where maintaining precise dimensional relationships is crucial.
4. Precision Engineering and Tolerance Optimization
The geometric design of planetary gearbox for robots components significantly influences performance characteristics including load distribution, noise generation, and efficiency. Modern optimization techniques leverage computational power to enhance traditional gear design principles.
4.1 Micro-Geometry Optimization
-
Profile Modification: Strategic modification of tooth profile curvature accommodates misalignment and deflections under load, ensuring even contact patterns across the entire tooth face.
-
Lead Crowning: Longitudinal modification along the tooth face width compensates for potential misalignments and ensures optimal load distribution under operational conditions.
-
Tip and Root Relief: Carefully calculated material removal at tooth tips and roots prevents interference during mesh engagement and disengagement, reducing stress concentrations and minimizing noise generation.
4.2 Backlash Control Strategies
Precision machining enables exact control of tooth thickness and spatial relationships in a planetary gearbox for robots. By maintaining tight tolerances on gear blank dimensions and tooth geometry, manufacturers can produce gear sets with predefined, minimal backlash:
-
Radial Play Management: Controlled clearance between planet pins and their bores ensures smooth operation without excessive freedom that contributes to positional inaccuracy.
-
Tooth Thickness Optimization: Precise control of individual gear tooth thickness during machining processes enables systematic backlash reduction while maintaining proper lubrication clearance.
-
Preload Applications: In some high-precision applications, controlled preload eliminates all backlash while maintaining smooth operation through meticulous bearing selection and mounting precision.
5. Quality Assurance and Testing Protocols
The manufacturing of precision planetary gearbox for robots demands rigorous quality control at every production stage. Advanced metrology equipment and standardized inspection protocols ensure consistent compliance with design specifications.
5.1 Comprehensive Inspection Regimen
Gear Geometry Verification
Dedicated gear inspection machines provide comprehensive analysis of tooth geometry and relationships. Critical measured parameters include:
-
Tooth profile deviation from theoretical design
-
Lead (helix) angle accuracy and consistency
-
Pitch deviation (adjacent and cumulative)
-
Total composite error and tooth-to-tooth variation
Dimensional Metrology
Coordinate Measuring Machines (CMM) with touch-trigger and scanning probes verify all critical dimensions of gearbox components:
-
Bore diameters and roundness
-
Feature location and orientation
-
Surface flatness and perpendicularity
-
Assembly relationship verification
5.2 Performance Validation
Efficiency Testing
Specialized test equipment measures transmission efficiency under various load conditions, verifying design predictions and ensuring optimal performance.
Noise and Vibration Analysis
Advanced acoustic measurement systems quantify operational noise levels, identifying frequencies and patterns that might indicate suboptimal gear meshing or bearing issues.
Durability and Life Testing
Accelerated life testing simulates years of operational use within compressed timeframes, validating design life expectations and identifying potential failure modes before production implementation.
Case Study Applications: Real-World Planetary Gearbox Solutions
Case Study 1: High-Payload Industrial Robotic Arm
Challenge: A manufacturer of industrial material handling robots required a compact planetary gearbox for robots for a new high-payload (300kg) rotary joint. The existing solution exhibited premature wear and excessive backlash after approximately 1,500 hours of operation.
JLYPT Solution: Our engineering team conducted a thorough failure analysis that identified insufficient surface hardness and suboptimal bearing arrangements as primary failure mechanisms. We recommended a material change to 8620 steel with carburizing to achieve a case depth of 1.0-1.2mm. The gear design incorporated enhanced profile modifications based on finite element analysis of the loaded condition.
Results: The optimized planetary gearbox for robots demonstrated remarkable performance improvements:
-
Service life increased to over 7,000 hours
-
Consistent backlash maintained below 1 arc-minute throughout service life
-
Operational noise reduced by 5.1 dB
-
Positioning accuracy improved by 22%
Case Study 2: Surgical Robotic System Joint Actuator
Challenge: A developer of minimally invasive surgical robotics needed a compact planetary gearbox for robots for a force-feedback actuator. The application demanded near-silent operation, near-zero backlash, and compatibility with sterilization protocols.
JLYPT Solution: The gearbox components were manufactured from Stainless Steel 17-4PH, heat treated to H900 condition for optimal strength and corrosion resistance. The manufacturing process emphasized exceptional geometric accuracy with tooth-to-tooth pitch errors maintained below 3 microns. Special attention was paid to surface finish quality, achieving Ra values below 0.2μm on all gear tooth flanks.
Results: The precision planetary gearbox for robots exceeded all performance expectations:
-
Acoustic emissions measured below 28 dB
-
Backlash measured at less than 0.5 arc-minutes throughout the operational range
-
Successfully passed all sterilization validation protocols
-
Enabled haptic feedback resolution previously unattainable in surgical robotics
Case Study 3: Agile Mobile Robot Drivetrain
Challenge: An engineering team designing a high-agility, four-legged mobile robot needed a lightweight yet durable planetary gearbox for robots for its hip joint drive. Weight and rotational inertia were critical constraints affecting dynamic performance.
JLYPT Solution: We selected Aluminum 7075-T6 for its exceptional strength-to-weight ratio and implemented High-Speed Machining (HSM) strategies to achieve thin, rigid webs and precise tooth forms. The components underwent hard-coat anodizing to improve surface hardness and wear resistance. The gear design optimized tooth geometry for maximum strength-to-weight characteristics while maintaining sufficient contact ratios for smooth operation.
Results: The advanced planetary gearbox for robots solution delivered outstanding performance:
-
55% reduction in rotational inertia compared to steel alternatives
-
Enabled 30% faster limb acceleration and deceleration
-
Maintained structural integrity under repeated impact loading
-
Contributed directly to the robot’s celebrated dynamic gait capabilities
Future Trends in Planetary Gearbox Technology
The evolution of planetary gearbox for robots technology continues to advance, driven by emerging requirements from next-generation robotic applications.
Additive Manufacturing Integration
Hybrid manufacturing approaches combining additive and subtractive processes show promise for producing gearbox components with optimized mass distribution and integrated cooling channels. Laser Powder Bed Fusion (L-PBF) processes can create complex internal structures impossible with conventional machining.
Advanced Surface Engineering
Emerging surface treatments including Diamond-Like Carbon (DLC) coatings and nanocomposite surface layers offer potential for further enhancing wear resistance and reducing friction in planetary gearbox for robots applications.
Smart Gearbox Technologies
Embedded sensor systems and functional materials may enable future planetary gearbox for robots to provide real-time performance data including load monitoring, temperature sensing, and wear tracking. These capabilities would facilitate predictive maintenance strategies and operational optimization.
Conclusion: Partnering for Robotic Innovation Excellence
The optimization of planetary gearbox for robots performance represents a sophisticated intersection of advanced manufacturing technologies, materials science, and precision engineering. As robotic systems continue to evolve toward greater capabilities and more demanding applications, the quality and performance of these critical components will remain fundamental to success.
At JLYPT, we combine state-of-the-art manufacturing equipment with deep technical expertise to deliver planetary gearbox for robots solutions that push the boundaries of what’s possible. Our comprehensive approach encompasses every aspect of gearbox production, from initial design consultation through final quality verification.
The five advanced strategies detailed in this guide—precision CNC machining, optimized material selection, micro-geometry enhancement, advanced heat treatment, and comprehensive quality assurance—represent our commitment to excellence in every component we produce.
For robotics engineers and manufacturers seeking to enhance system performance through superior gearing solutions, contact JLYPT today to discuss your specific application requirements. Let’s collaborate to transform your robotic concepts into high-performance realities.






